Какой механизм можно назвать роботом? Названия для школы робототехники. Как назвать Какой механизм можно назвать роботом
Как часто бывает в молодой области человеческой деятельности, в робототехнике нет еще устоявшейся, общепризнанной терминологии. Споры среди специалистов по поводу того, какой же механизм можно назвать роботом, не утихают по сей день. А люди, не связанные с робототехникой, часто думают, что робот - это устройство, которое выполняет за человека те или иные трудовые операции. Так ли это?
Обратимся к густонаселенному в наше время миру машин и механизмов. Немалое их число выполняет такую работу, которую еще совсем недавно человек делал сам. Не будем далеко ходить за примерами. Оглядимся вокруг. Многие из нас уже не вертят ручку домашней "мельнички" для кофе, а включают электрическую кофемолку, и она за несколько секунд измельчает кофейные зерна, т. е. делает это за нас. Так же обстоит дело с электропилой, электродрелью и т. д. Но вряд ли вы назовете все эти механизмы роботами. В чем же дело? Что отличает робота, например, от электрифицированного инструмента?
Рис. 12. Две главные части робота: 1 - исполнительный механизм ("рука") и 2 - "мозг" (управляющее "рукой" устройство).
Чтобы разобраться в главном, мы не будем углубляться в вопросы терминологического характера. Присоединимся к мнению тех, кто считает, что роботом можно назвать такое устройство, у которого имеются в совокупности две основные части: исполнительный механизм - "рука" 1 и система управления этим механизмом - "мозг" 2 робота (рис. 12). Такое представление о роботе сразу же проясняет вопрос о том, почему электроинструменты - это не роботы: у них нет, кроме простого выключателя, системы, управляющей исполнительным механизмом (пилой, сверлом и пр.).

Рис. 13. Конструкция промышленного робота, компактно объединяющая его "руку" и "мозг"

Рис. 14. Механическая "рука" робота - манипулятор; 1 - захват (рабочее звено).
Выглядит промышленный робот, например, так, как изображенный на рисунке 13: у этого робота хорошо видна "рука" 1, а "мозг" спрятан в корпусе 2.
Самая сложная часть в конструкции робота - это, как и в организме человека,- "мозг". Поэтому начнем знакомство с роботом с более простой его части - исполнительного механизма.
Автоботы и десептиконы, которые уже давно заполонили магазины игрушек, надолго заняли и экраны кинотеатров с выходом первого фильма «Трансформеры». Имена роботов, таких как Оптимус Прайм и Мегатрон стали также известны, как Гарри Поттер и Волан-де-Морт. Автомобили, которые на самом деле пришельцы, превращающиеся в человекоподобных существ, пришлись по душе зрителям. А желтый Chevrolet Camaro по имени Бамблби и вовсе стал любимцем многих.
Совсем скоро на экраны выходит пятая часть киносерии, самое время пересматривать предыдущие части. А вы знаете как выглядят герои «Трансформеров»? Имена тоже все знакомы? Давайте проверим это на последнем на данный момент фильме «Трансформеры: Эпоха истребления». Тем более что события новой ленты являются продолжением предыдущей.
Немного о самом фильме
«Эпоха истребления» задает киносерии новое направление. После вторжения в Чикаго, автоботы попали в немилость. В фильме затрагивается именно тема испортившихся отношений «люди/трансформеры». Имена Оптимуса Прайма, Бамблби и команды становятся известны всему миру, ведь это имена опасных созданий.
Примечательно, что в «Эпохе истребления» затрагивается многообразная мифология трансформеров, сюжет охватывает значительно большее количество событий, чем первые три фильма, которые были построены исключительно на сражении автоботов против десептиконов. Появляется новый подвид - диноботы - еще одно доказательство того, что команда фильма серьёзно вознамерилась отойти от предыдущей сюжетной линии.
Учитывая, что изначально режиссёр собирался остановиться на трех фильмах, можно считать, что это новая эра для фильма «Трансформеры»
Имена автоботов
Оптимус Прайм - мудрый и грозный лидер автоботов. В начале фильма он предстает в образе ржавого, покалеченного грузовика Marmon, но позже преображается в магистральный тягач Western Star 4900.

Бамблби. С самого начал он был верным помощником Оптимуса Прайма и защитником человечества. Несмотря на поврежденный голосовой модуль, Бамблби активно общается, переключая радиостанции и подбирая подходящие композиции. Изначально в фильме он предстает в виде Chevrolet Camaro 1967 года, а затем становится блестящим Camaro 2014.

Рэтчет. По своей природе он не боец, но является ценным членом команды - медиком. Он решает встать на сторону автоботов, потому что чувствует, что именно у них есть все шансы достичь мира - единственное, что его действительно интересует. Трансформируется в спасательный внедорожник что в очередной раз показывает его миролюбивый настрой.

Хаунд. Карикатурный персонаж, который несмотря на устрашающий вид, любит называть Землю своим домом и как ребенок радуется простым вещам. В фильме он выглядит как тяжеловооруженный артиллерист с роботизированной бородой и любовью использовать патроны в качестве сигар. Его механизированный облик - тактический автомобиль Oshkosh.

Кроссхейрс - мастер по оружию, парашютист. Приходит на смену погибшему в третьей части фильма Айронхайду. Кроссхейрс не большой фанат Земли и при случае не против ее покинуть. Трансформируется в Chevrolet C7 Corvette 2014 года.

Дрифт. Изначально был на стороне десептиконов, но после переметнулся к автоботам. В фильме он предстает в образе спокойного самурая, умело владеющего мечами и практически не имеющего себе равных. Трансформируется в потрясающий Bugatti Veyron Grand Sport Vitesse 2013 года и любит при случае подрифтовать по улицам города.


Джанкхип. Солдат десептиконов, единственной целью существования которого является битва с автоботами. Трансформируется в мусоровоз.

Локдаун. Несмотря на то что находится он в списке десептиконов, технически Локдаун не является частью ни одной из сторон. Он безжалостный межгалактический охотник за головами, которого наняли, чтобы он выследил одного их автоботов, скрывающихся на Земле. Кто его нанял и на кого он охотится не раскрывается. Трансформируется в Lamborghini Aventador 2013 года.

Имена диноботов
Гримлок . Упертый лидер диноботов. Не любит слушать никого, включая Оптимуса Прайма. Больше начальства ненавидит десептиконов. Превращается в мощного металлического Тиранозавра-Рекса.
Слэш . Хитрый охотник Велоциратопс, напарник Хаунда.

Вместо заключения
У кого-то из роботов была лишь пара секунд экранного времени, кто-то отвоевал себе значительную долю сюжета, но благодаря стараниям команды, каждый из них - и автоботы, и десептиконы и диноботы, на экране выглядят потрясающе детализировано и впечатляюще мощно.
Как и в предыдущих фильмах, создатели постарались включить как можно больше персонажей, на радость поклонникам серии фильмов «Трансформеры». Имена персонажей полюбившейся истории были рассмотрены нами в данной статье.
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид
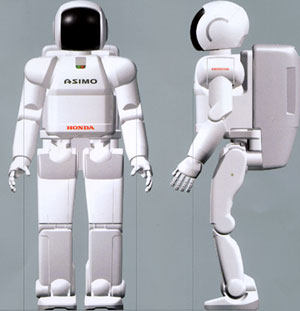
ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство

Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
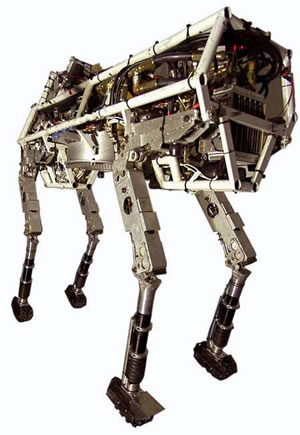
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.

QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Выражение «как корабль назовешь, так он и поплывет» актуально во всех ситуациях, связанных с выпуском новой продукции. И если вы собираетесь создать собственного робота и хотите показать его миру, продавать или сдавать его в аренду, правильный выбор названия — это очень важная задача.
В этой статье мы поможем вам разобраться со основными вопросами при выборе имени для робота, чтобы оно было максимально удачным.
Сочетаемость с внешним видом
На первый взгляд подбор имени для робота кажется простой задачей. Сначала образ желаемого механизма возникает у нас в голове, потом уже на практике. Имя приходит в самом конце, и, как правило, оно основывается на внешнем виде и предназначении машины. Очень важно, чтобы эти два элемента были сочетаемы между собой.
К примеру, если это какой-нибудь колесный робот, вроде машинки, то в названии можно использовать слова «кар» или «roll». Если это человекоподобный робот, вполне подойдут человеческие имена, как русские, так и зарубежные. Главное, что бы имя было легко воспринимаемым и запоминаемым. Если это робот-животное - можно взять что-то из кличек домашних питомцев или выдуманных персонажей мультфильмов или сказок.
Примеры удачных имён роботов
Робот Robonaut
Robonaut - известный человекоподобный робот, созданный NASA для работы на МКС.
Разработчики всего лишь соединили «robot» и «astronaut», и получили удачное соотношение внешнего вида и рода деятельности машины.
Робот Big Dog

Big Dog - робот-собака от Boston Dynamics, который действительно является мощным четвероногим механизмом, имя которого здорово отражает его сущность.
Робот WALL-E

Можно использовать аббревиатуры, если вы придумали сложное развернутое название, но хотите называть робота более кратко. Удачный пример: мультяшный робот WALL-E, получивший название от waste allocation load lifter, Earth-class (мусоропогрузчик земного класса). Его имя получилось благозвучным и сочетаемым с внешностью этого милого механизма.
Простота и доступность
Немаловажный момент — это домен с именем робота. Если вы хотите создать сайт, показывающий вашего робота во всех подробностях, ищите свободный домен. Таким образом, вы обеспечите своему роботу уникальность и избежите в дальнейшем путаницы и прочих проблем.
Кроме того, название должно быть простым. Сложные слова мало того, что трудно выговорить и прочитать, их тяжело запомнить. Старайтесь не перегружать имя согласными или гласными, соблюдая благозвучность. Особенно это касается названий рода «фэнтези» и иностранных имен.
Избегайте также большего количества цифр. В самодельных моделях это ни к чему. Обычно наличие чисел в названии уместно, если речь идет о многих версиях устройства или целой линейке выпускаемой продукции.
Экспрессивность
Но это еще не все. Имя робота не должно навеивать на плохие мысли и ставать поводом для шуток и ругательств.
Если вы хотите назвать его иностранным словом, проверьте все значения слова, дабы не было неловкой ситуации, как это случилось с известным андроидом Pepper (прямое значение - «перец»). Разработчики, Aldebaran Robotics и Softbank, назвали его так, потому что одно из значений слова — «живой, энергичный», что, конечно, соответствует его предназначению. Но некоторые пользователи решили добавить «перчинку» в использовании робота для сомнительных целей, в том числе и сексуального характера.

Использование людских имён для роботов
Человеческие имена — отличный вариант для робота. Но, опять же, важно, чтобы оно было соотносимо с его внешним видом и предназначением. Плюс, оно должно соответствовать культуре, в концепции которой был изобретен механизм. Понятно, что если робот выполнен в японском стиле, назвать его «Маша» будет неуместно.
В конце также отметим, что имя робота не должно вводить потребителей в заблуждение, снижать возникающее в их восприятии качество механизма, противоречить идентичности или размывать представление о назначении и особенностях данного устройства.
Таким образом, проанализировав все эти нюансы, вы сможете поработать над именем робота более тщательно и подобрать самый удачный вариант.
Следите за нашими обновлениями и получайте больше интересных статей из мира робототехники и искусственного интеллекта.
Какой механизм можно назвать роботом?
Как часто бывает в молодой области человеческой деятельности, в робототехнике нет еще устоявшейся, общепризнанной терминологии.
Обратимся к густонаселенному в наше время миру машин и механизмов. Немалое их число выполняет такую работу, которую еще совсем недавно человек делал сам. Не будем далеко ходить за примерами. Оглядимся вокруг. Многие из нас уже не вертят ручку домашней "мельнички" для кофе, а включают электрическую кофемолку, и она за несколько секунд измельчает кофейные зерна, т. е. делает это за нас. Так же обстоит дело с электропилой, электродрелью и т. д. Но вряд ли вы назовете все эти механизмы роботами. В чем же дело? Что отличает робота, например, от электрифицированного инструмента?
Рис. 12. Две главные части робота: 1 - исполнительный механизм ("рука") и 2 - "мозг" (управляющее "рукой" устройство).
Чтобы разобраться в главном, мы не будем углубляться в вопросы терминологического характера. Присоединимся к мнению тех, кто считает, что роботом можно назвать такое устройство, у которого имеются в совокупности две основные части: исполнительный механизм - "рука" 1 и система управления этим механизмом - "мозг" 2 робота (рис. 12). Такое представление о роботе сразу же проясняет вопрос о том, почему электроинструменты - это не роботы: у них нет, кроме простого выключателя, системы, управляющей исполнительным механизмом (пилой, сверлом и пр.).

Рис. 13. Конструкция промышленного робота, компактно объединяющая его "руку" и "мозг"

Рис. 14. Механическая "рука" робота - манипулятор; 1 - захват (рабочее звено).
Выглядит промышленный робот, например, так, как изображенный на рисунке 13: у этого робота хорошо видна "рука" 1, а "мозг" спрятан в корпусе 2.